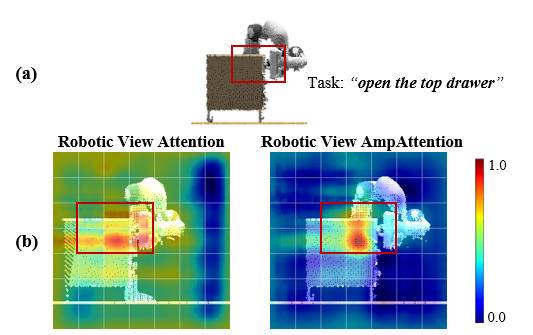
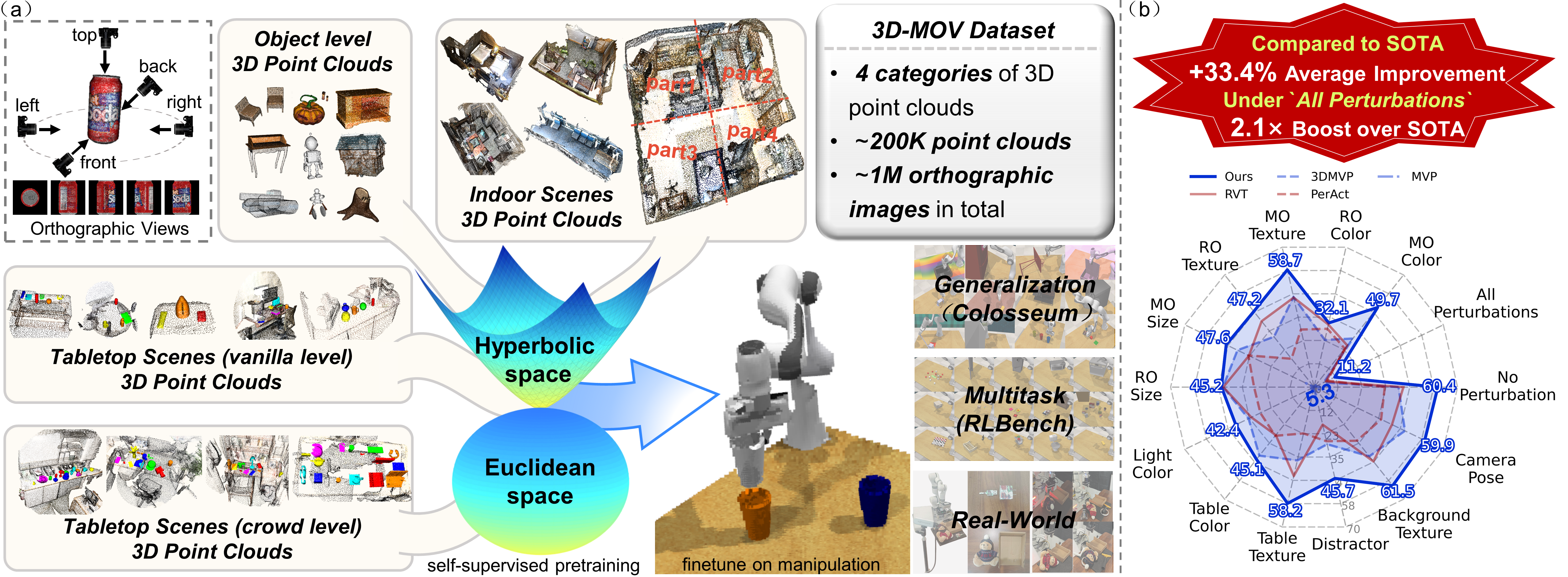
Differential Amplifier-Inspired AmpAttention for Multi-View Robotic Manipulation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026)

Hi, I am Jin Yang. I received my Ph.D. degree in June 2026 from the Institute of Artificial Intelligence and Robotics (IAIR) at Xi'an Jiaotong University. I was supervised by Prof. Ping Wei.
My research mainly focuses on Multimodal Learning. I am interested in effective representation, fusion, and reasoning methods for multimodal information. My current goal is to build intelligent models and robotic systems that can perceive multimodal signals and make reliable decisions.
Welcome to contact me for any discussion and cooperation.
I successfully defended my Ph.D. dissertation.
One paper accepted by ICRA2026. [WaveComm]
One paper accepted by IEEE Transactions on Multimedia. [VABooster]
One paper accepted by Pattern Recognition. [UPM]
Invited speaker at ICCIR 2025, delivering an oral presentation on video multimodal learning. [ICCIR 2025]
Winner of the First Prize in the CVPR2025 Robotwin Dual-Arm Collaboration Challenge (Real-World Track). [Robotwin Challenge]
Winner of the Second Prize in the CVPR2025 Robotwin Dual-Arm Collaboration Challenge (Simulation Round1). [Robotwin Challenge]
One paper accepted at CVPR 2024. [TaskWeave]
One paper accepted by IEEE Transactions on Multimedia. [TransGMC]
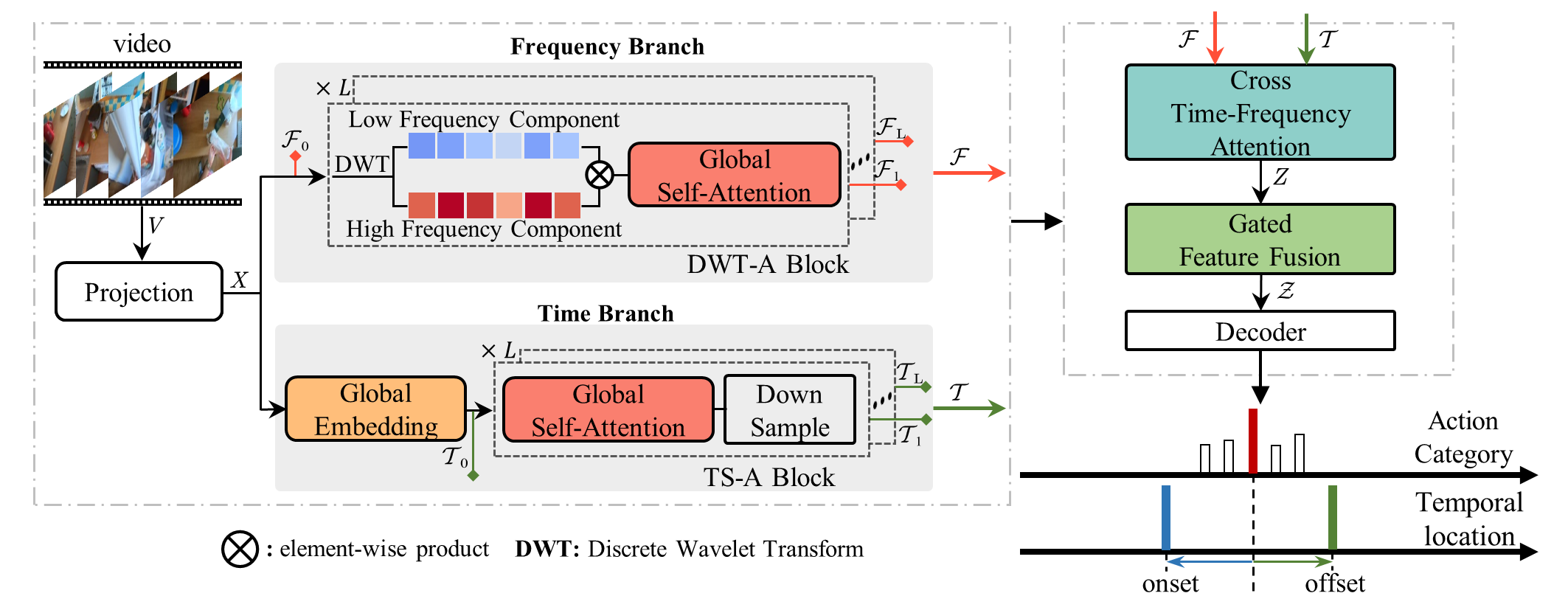
One paper accepted by IEEE Transactions on Circuits and Systems for Video Technology. [TFFormer]
Selected Publications. The list may not be up-to-date. Please find my latest publications on Google Scholar.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026) Project leader
IEEE International Conference on Robotics & Automation (ICRA 2026) Co-first author & Project leader
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT 2024)
2023
IEEE Transactions on Multimedia (TMM 2023)
CN Patent 魏平, 杨进. 基于多模态统一表征的视频语言时序定位方法及系统. No. 2025102048215
Method and system for video-language temporal grounding based on unified multimodal representations
CN Patent 彭刚, 杨进. 一种基于深度强化学习的机械臂运动规划方法和系统. No. 2022105019028
Robotic arm motion planning method and system based on deep reinforcement learning
CN Patent 彭刚, 杨进, 黎莉, 尹智. 一种智能清洗机器人路径规划方法及系统. No. 2021104000462
Path planning method and system for an intelligent cleaning robot
A WebUI for video moment retrieval and highlight detection. It retrieves moments of interest from long untrimmed videos and supports zero-shot adaptation to open-set content.
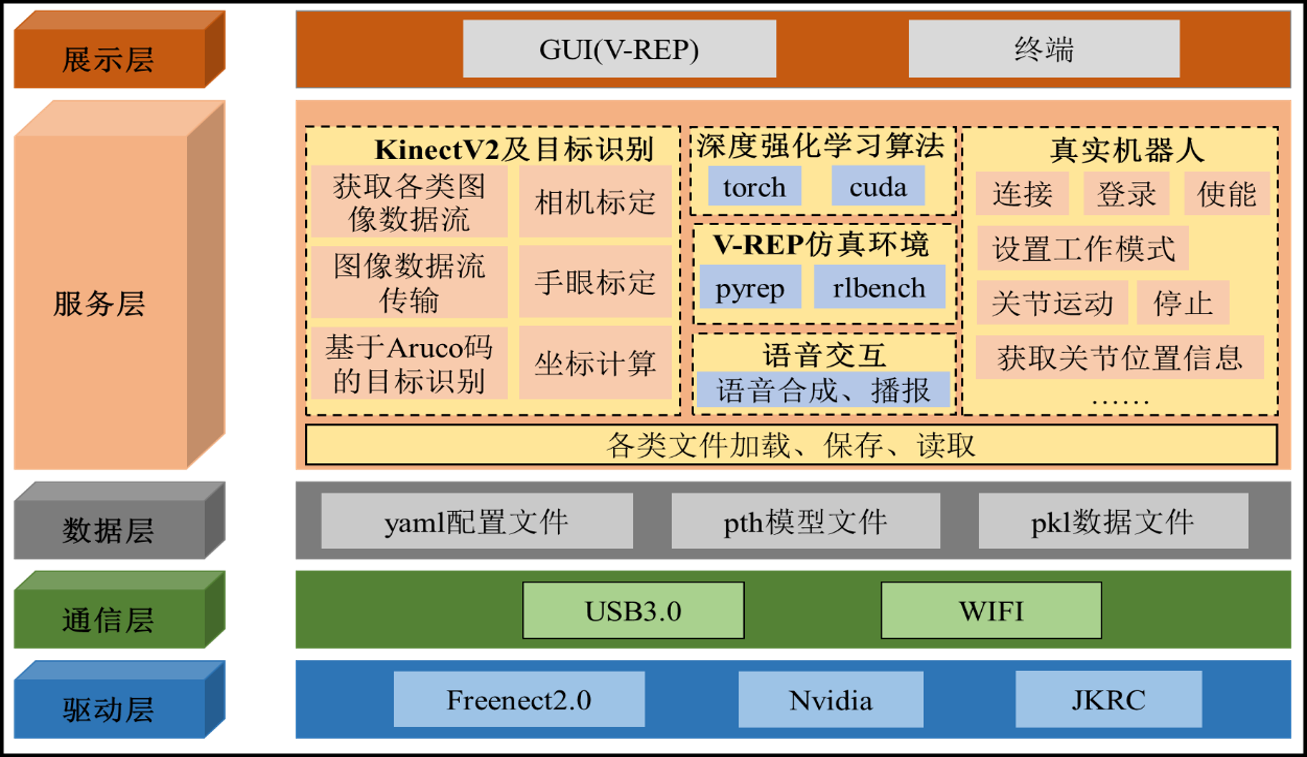
This is a DRL-based robotic manipulator motion planning system for simulated-real scenarios. The two demos show dynamic target scenarios without and with obstacles, and the framework image summarizes the planning system.