
-
Hyperbolic Multiview Pretraining for Generalizable Robotic Manipulation
基于双曲空间的多视角预训练用于可泛化的机械臂操作
[In Submisson]/
Please see our website for more visualization results: https://blien2002.github.io/HyperMVP/
-
AmpAttention inspired by Differential Amplifier for High-Precision Robotic Manipulation
差分放大器启发的AmpAttention用于机械臂高精度操作
[In Submisson]/
Please see our website for more visualization results: https://anonymous.4open.science/w/RVAF-Anonymization
-
WebUI for joint Video Moment Retrieval and Highlight Detection
面向视频时刻检索与高光检测的WebUI系统
[CVPR2024 TaskWeave]/ [Publication2]/ [Publication3]
You can retrieve moments of interest from the long-term untrimmed video in just a few simple steps. Notably, this system possesses zero-shot capabilities, allowing it to quickly adapt to new open-set video content. It is beneficial for various valuable downstream tasks, such as content monitoring and auditing, video summarization and clipping, video search engines, creating video-text pair datasets, and AD placement.
-
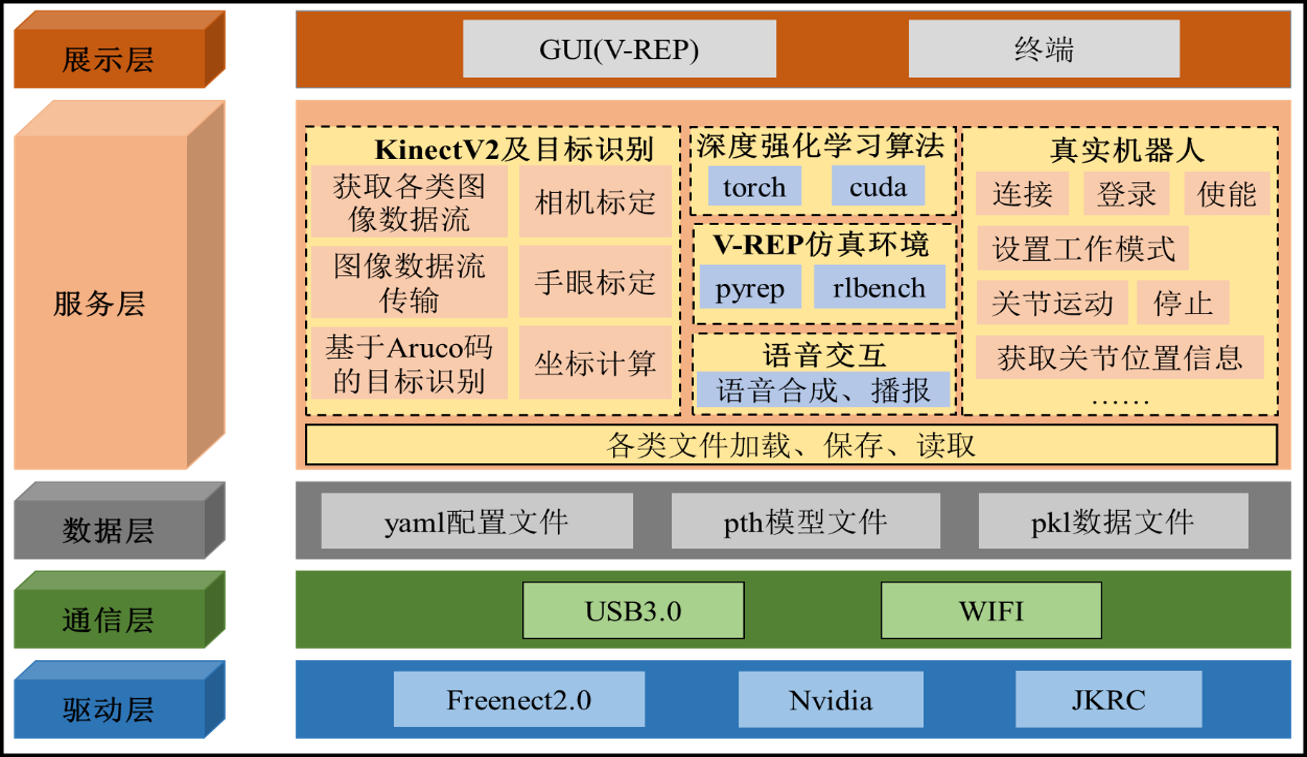
Deep Reinforcement Learning for Robotic Manipulator Motion Planning
基于深度强化学习的机械臂运动规划系统
[TSMC2022]/ [ICCAR2021]
This is a DRL-based robotic manipulator motion planning system for simulated-real scenarios. Top left: dynamic target scenario without obstacles. Bottom left: dynamic target scenario with obstacles. Bottom right: system framework.
-
2019World Robot Contest (Trico-Robot Challenge)
2019世界机器人大赛-共融机器人挑战赛
This challenge included four tasks: autonomous grasping and placing, dual-arm coordinated assembly, dual-arm coordinated construction, and dual-arm coordinated transportation. The competition was held within a designated workspace, using dual-arm collaboration to complete complex tasks. It simulated scenarios where robots perform part assembly and transportation.
-
System of Image Preprocessing and Annotation Assistance
图像预处理及图像标注辅助系统
It is implemented using cross-compilation with C++ and Python in QT5. It enables rapid data augmentation of batch image datasets, including color enhancement, brightness adjustment, scale transformation, affine transformation, and angle transformation. Additionally, it supports automatic annotation and validation of the augmented image data. It significantly shortens the initial dataset creation process.
-
Automated Patch Clamp and Cell Detection Simulation System
自动化膜片钳及细胞检测仿真系统
Automated patch clamp technology can independently execute experimental operations according to the experimental plan. It requires operating on cells within a highly limited space. By integrating the laboratory's existing microscopy system, a four-axis micromanipulator that meets experimental needs was designed and subjected to simulation analysis. The simulation analysis revealed that the optimal approach angles for the micromanipulator under 40x0.8, 25x1.0, and 25x0.95 objectives were 27°, 29°, and 29°, respectively.
Selected projects from 2019 to present.